
By combining Particle Swarm Optimisation (PSO) and Fuzzy Logic, the team at SRM AP has discovered a hybrid smart system for accurate localization of autonomous aerial vehicles (AAVs). Dr Awadesh Dixit, Dr Firoj Gazi, Dr Muzakkir Hussain Md, Assistant Professors and MTech student Ms Naga Nandini Devi from the Department of Computer Science and Engineering, have published their research article “OALHMT: Optimised AAV Localization Using Hybrid Metaheuristic Techniques” in the IEEE Journal of Indoor and Seamless Positioning and Navigation, that discloses the making and implementation of this smart system that is precise and works better than current methods for positioning and navigation.
Abstract
Accurate localization remains a critical challenge for autonomous aerial vehicles (AAVs) due to their high-speed, multidirectional movement. Precise positioning is essential for efficient resource management and task reallocation during flight. This research proposes a bioinspired hybrid model combining Particle Swarm Optimization (PSO) with fuzzy logic to enhance AAV localization accuracy. PSO effectively explores the search space to identify optimal positions, while fuzzy logic fine-tunes the solution using real-time environmental inputs such as signal strength, sensor noise, and GPS inaccuracies. This synergistic approach leverages PSO’s global optimization with the contextual adaptability of fuzzy systems, delivering robust and precise localization under dynamic and noisy flight conditions. Comparative evaluations with existing methods demonstrate the model’s superior accuracy and responsiveness in real-time AAV operations.
Practical Implementation/Social Implication of the Research
Proposed hybrid optimization for Indoor localization through swarm UAVs, localization methods for autonomous aerial vehicles (AAVs) typically rely on the global positioning system (GPS), which is effective in open environments. GPS provides accurate real-time positional data, making it widely used for outdoor AAV localization.
The team will continue to focus on developing swarm-based V2X communication and coordination, and reduced interference, secure communication for enhance UAV networks performance, advance AI-related applications.
Link to the article
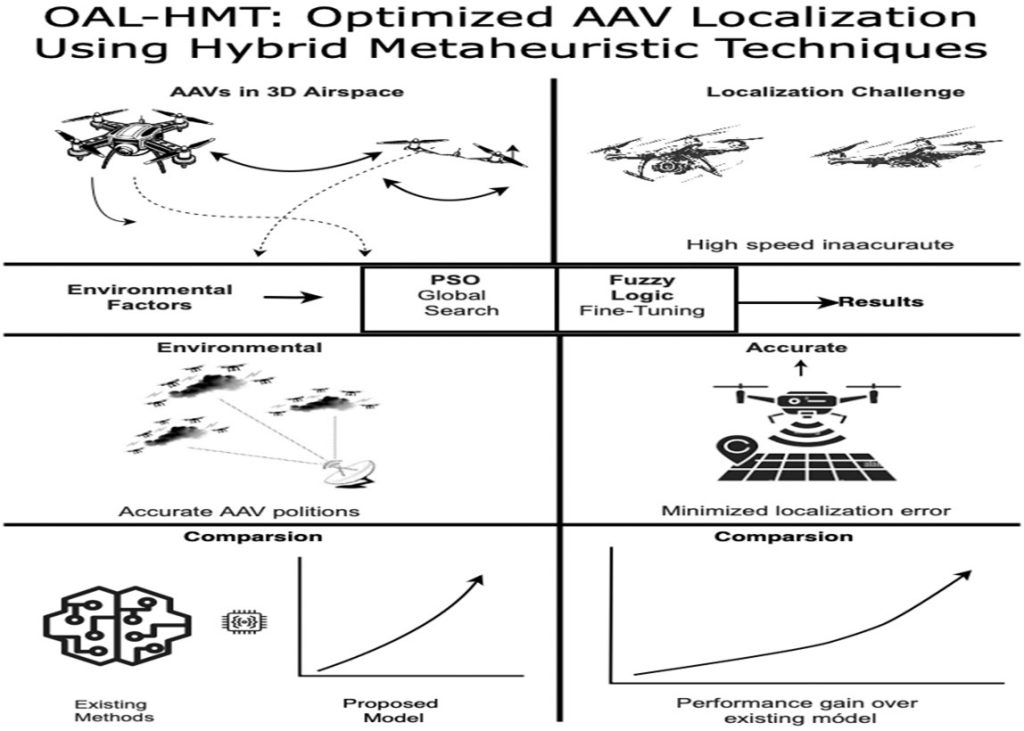
Overall abstract diagram of the paper